
集萃智造水陆两栖六足机器人,爬坡越障小能手


产品简介


Product introduction

六足机器人是基于仿生原理研制的轮腿复合式推进机器人,其推进方式综合了轮式推进速度快、稳定性好和仿生足式推进灵活性高、适应性好的优点,能够广泛地应用于野外以及复杂恶劣的环境中。六足机器人能在水、陆环境自由切换,在地震救灾、野外侦察、资源探测等领域发挥重要作用。
集萃智造结合仿生学、机构学、机构综合等学科的基本理论,研发出二代水陆两栖六足机器人,针对机械结构进行了减重优化、大幅提升运行速度、提高爬坡能力及续航能力,实现两栖六足机器人的高移动效率、低运动噪声、高能量利用率、高环境适应能力的目标。

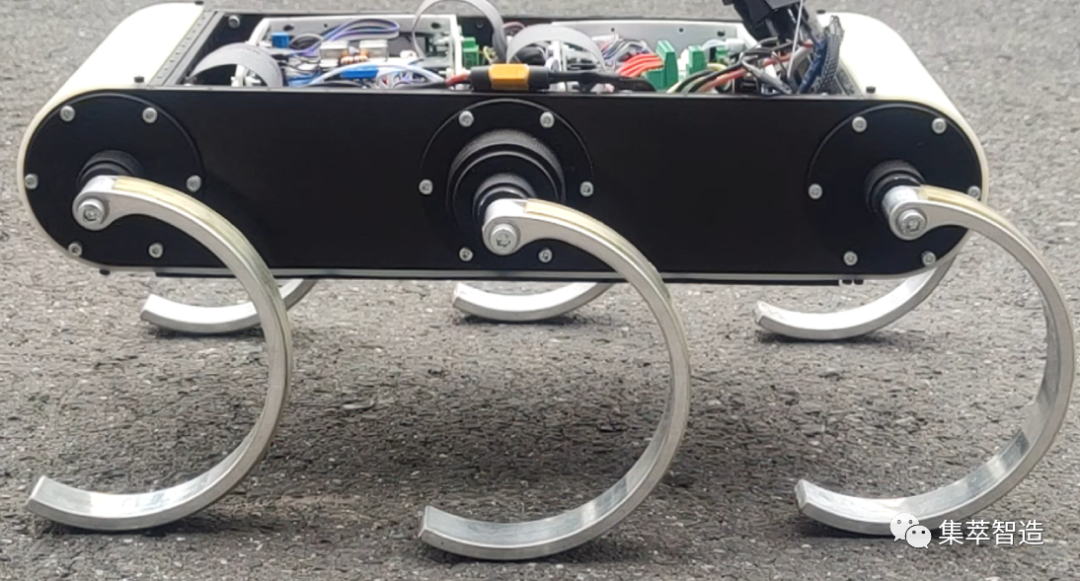
产品组成 | 框架外壳模块 |
电机驱动模块 | |
弧形腿结构 | |
电子舱模块 |
产品设计思路
Product Design Idea
1
机器人应用在救灾场景时,由于救灾现场地形结构非单一性,建筑物的倒塌致使救灾空间受到限制,对机器人的环境适应性和体型大小有很高的要求。
2
考虑到灾难现场建筑物的二次倒塌以及渗水积水问题,机器人需轻巧灵活且具有一定的防水密封性。
3
在野外侦查和隐蔽点火力打击时,机器人在运行速度和执行效率要求很高,同时为了更好的隐蔽性,机身体型需小型化。
产品特点
Product features
水陆两栖:水陆环境自由切换,能够快速适应多种复杂环境。
长距离数据传输:能够完成灾情的精准探测并传回可靠的灾害情况信息和被困人员信息,为灾后被困人员和搜救人员提供生命保障。
模块化、小型化、轻量化设计:机器人结构采用模块化设计方式,便于维修更换;整机轻巧,重量不足10kg;其框架外壳式的机身,在承受外部冲击力的同时兼具整机密封性能。
越障能力强:爬坡越障能力强,机器人可在崎岖不平的地形中运行。
多种步态和步态切换:机器人具有优化后的三足行走步态、四足步态、基于S型加减速算法设计新型六足同步步态。同时对机器人规划了三足步态加速走动、三足向四足切换的步态。
多传感器信息融合:水下视觉传感器、压力传感器、陀螺仪传感等多传感器融合,保证六足机器人的稳定作业。
抗干扰能力强:高/低温防护技术、电磁防护抗干扰技术、硬件抗干扰措施、防震动冲击、机器人密封,提高六足机器人抗外界环境干扰能力。
产品参数
Product parameters
性能指标 | 技术参数 |
整机质量/kg | 10kg |
整机长宽高/m | 0.5/0.4/0.23 |
平均运动速度m/s | 0.7 |
爬坡能力 | <30° |
越障能力 | 200mm |
续航时间/min | 30 |
负载能力/kg | 5 |
弧形腿半径/m | 0.09 |




;){kind=link}