
机器人电机选型需要注意什么?
因自研电机,同时自己设计制造机器人产品,我们发现,选择一款恰当的电机及传动系统非常重要,它能够帮助我们顺利推动研发工作、设计出性能更加稳定可靠的机器人。
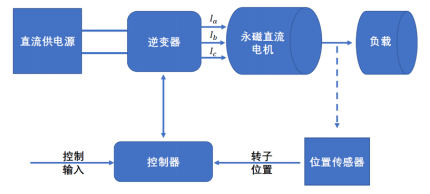
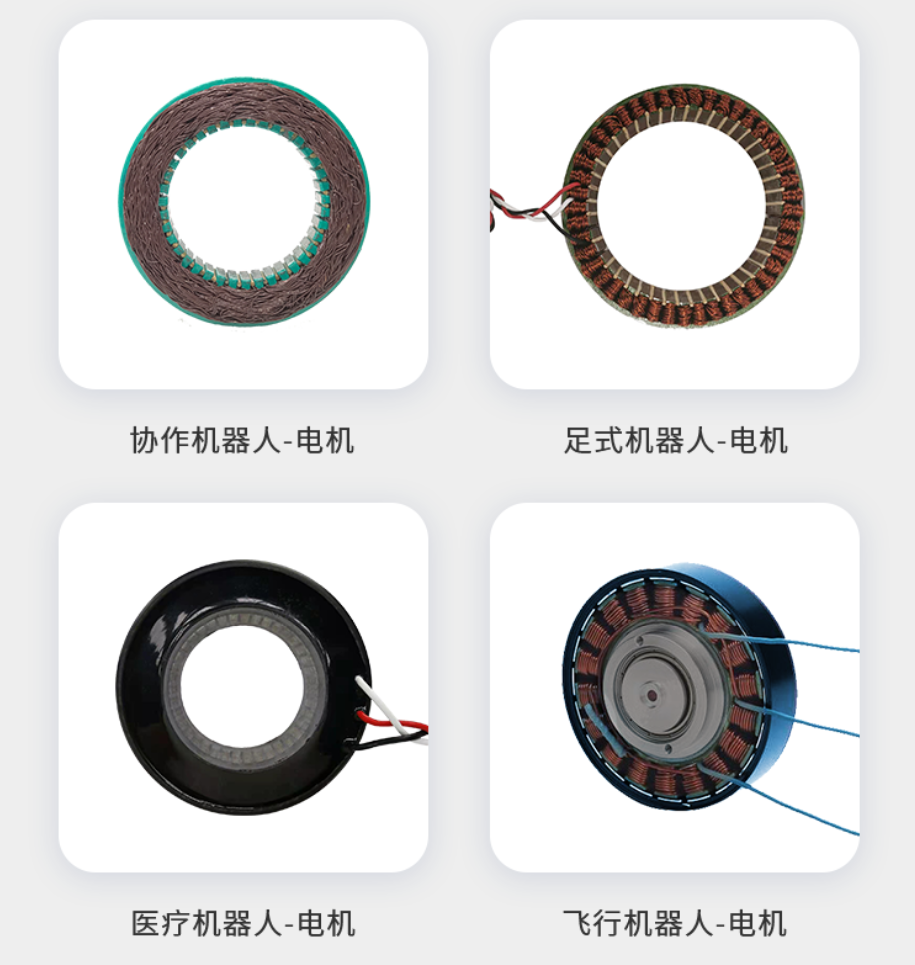
电机素有机器人“心脏”之称。一般意义上,机器人包括机械臂、足式机器人、无人机、轮式机器人、手术机器人等,不同的机器人依据不同场景需要不同的动力学设计,因此其所采用的电机也有所不同。
在常用的电机类型中,直流无刷电机因其具有显著的高扭矩密度、高效率、体积小、高寿命、低噪声、高性价比等优点,而广泛用在机器人领域。如我们的轻型协作机器人产品,所采用的就是直流无刷力矩电机。

图 | 无刷电机
在传统分类中,交流电机相比直流电机成本更低。不过如今交直流无刷电机的分类没有明显的界限,直流无刷电机虽然挂着“直流”的名号,本质上是一种交流同步电机,驱动器完成了直流电源逆变成交流的过程。
01
重要参数计算
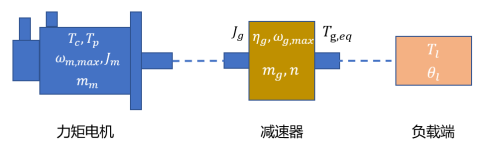
图 | 电机的传动系统
其中,传动系统的功率和伺服带宽是我们对电机进行选型时首先要做的重要考量。功率则是电机的**特征。
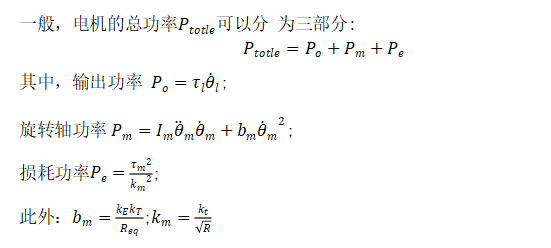
图 | 功率的计算公式
02
场景提出的”特殊要求“
比如轻型协作机器人、手术机器人等类别产品,因它们所应用的场景对其执行任务时的平稳性要求更高,低速平稳性、波动小就成为我们在挑选直驱方案中需要考虑的重要指标。
一般情况下,考虑到电动势或电流非正弦引起的纹波转矩和齿槽转矩等是影响电机低速平稳性的主要原因,在低速平稳性上有做过优化的电机,具有优化后的槽数组合、斜极和斜槽、优化的极弧系数、不等厚磁极、磁极分段布置等特征。
足式机器人等应用场景,则对电机的短时过载能力和峰值扭矩密度要求更高。言下之意,在做此类电机的挑选时,关键需要考虑的是,电机设计者如何处理温度这一变量。
在冷却方案的选择上,足式机器人的电机追求扭矩输出密度,即单位体积或质量下的输出功率,这意味着油冷水冷等增加整机质量的冷却方式不太可能作为优选。
03
选型还需要注意的原则
(1)较小的转动惯量和较大的堵转转矩;
(2)尽可能小的时间常数和启动电压;
(3)较长时间的过载能力,以满足低速大转矩的要求;
(4)能够承受频繁启动、制动和正、反转;
(5)为避免机器人电机过热,一般要求电机的额定连续转矩值大于周期内电机转矩的均方根值;
最后
扫描下方二维码,即可免费获得技术解决方案和试用。





;){kind=link}