
突破卡脖子技术,研制协作机器人核心零部件的方向与思考

目前,经过多年的市场培育,协作机器人已经逐步走进工厂自动化、科研实验室,医疗手术,农业采摘等场景。自动化/智能化为企业带来成本费用改善空间,部分岗位无人化、人机协作的落实可显著降本增效,促使各企业对协作机器人的需求攀升。

但协作机器人这一细分市场的发展仍然存在显见的阻力。一是协作机器人仍面临很多实际应用场景适应性、可靠性与安全性三大问题,解决各种的应用场景障碍是未来协作机器人的主要目标。各应用领域的专家和机器人专家一起,仍在积极努力探索,试图突破各种局限。
二则,因国外公司主导机器人及零部件市场,产品成本和价格使得中小企业望而却步,限制了企业应用机器人的速度。国内机器人厂商一味采购包括电机、减速器和光电编码器在内的进口核心零部件,机器人市场格局将难以有所改观,协作机器人的未来也将重复工业机器人的老路。因此在应用需求的导向下,实现核心零部件自主研发和国产化,必将是协作机器人长远发展之道。
以江苏集萃智造为例,集萃智造的核心研发团队,突破协作机器人的一系列关键技术,研发电机等核心部件,不仅大大降低了物料成本,让利于中小企业,也在技术自研和融合过程中,不断加快推进协作机器人在实际产线和生活中的应用。如集萃智造自主研发的直流永磁伺服电机,实现了将电机成本从四万多元直接降低到三千元,并且突破了一系列软件和硬件的关键核心技术,增强协作机器人的核心竞争力,降低成本,让利中小企业,不断提升自己的产品质量。

集萃协作机器人的关键技术及其研发思考主要体现在以下几个方面:
▍1、 永磁直流伺服电机
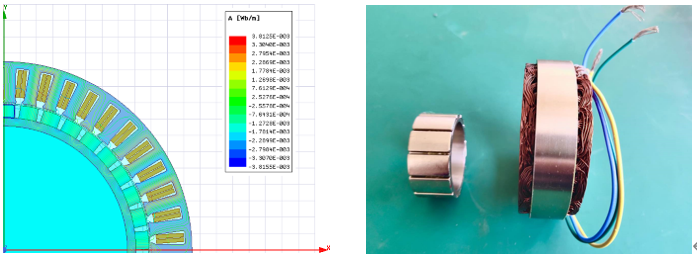
为解决机器人核心零部件力矩电机替代难题,集萃智造研发了IIMT-TQ-I系列无框力矩电机,它是新型直驱力矩电机,专为需求体积小巧紧凑、轻重量、低惯量,但高功率的电机应用而设计。
通过利用先进的有限元设计工具,实现电磁与温度耦合仿真,计算电机的电磁特性、温度分布等,全面分析电机的多物理场耦合特性。集萃智造电机采用分数槽集中绕组结构设计,使其具有转矩密度高,转矩波动小,齿槽转矩低,弱磁调速性能好等特点。在定子材料的选用上,电机选择了高导磁、低损耗的薄片高牌号软磁合金材料,磁钢的选用标准是高牌号UH级别以上,耐温达180°。线材及绝缘材料则采用进口高牌号产品。来料都严格经过专用检测仪器检查。
▍2、 碰撞电流检测算法
协作机器人**的优点就是其能够进行碰撞检测实现与人协作功能,而协作机器人在没有力矩传感器的情况下,碰撞力很难检测,但加入力矩传感器又会使其成本大大提高。
目前无力矩传感器的协作机器人进行碰撞检测大多采用两种方式:电流环方式和双编码器方式。电流环方式直接根据电流环(力矩)反馈和机器人系统动力学方程,估计出外力矩。这种方式最困难之处就是关节摩擦力估计,该摩擦力受到机器人位姿,转速,温度,油脂状况等多种因素影响,难以准确建模和辨识,所以应用较为困难且检测灵敏度低。双编码器方式利用了谐波减速器的特性,谐波减速器的刚度较低,这里其实是将谐波减速器当作一个关节力矩传感器使用,使用与柔性关节同样的算法也可以估计外力,但谐波减速器的刚度比力矩传感器还是要高很多,外力检测精度较低,但原理上也可以避免摩擦力的影响。
集萃智造研发团队经过三年的研发,开发出一套采用电流的方式检测机器人的碰撞检测方法。采集机器人的待检测关节的电流值;在每一时刻,将该时刻的电流值与之前预设间隔时刻的电流值作差,并取绝对值,得到该时刻的电流变化量;获取当前时刻之前连续多个时刻的电流变化量的**值;根据所述**值确定比较阈值;判断当前时刻电流变化量是否大于所述比较阈值;如果当前时刻电流变化量大于所述比较阈值,则判定所述待检测关节发生碰撞。
机器人的碰撞检测方法,通过采集机器人待检测关节的电流值,并对其当前时刻与预设间隔时刻的电流值作差取绝对值处理,得到相应的电流变化量,基于连续时间段的电流变化量的**值确定比较阈值,将当前时刻电流变化量与比较阈值进行比较,根据比较结果判定待检测关节是否发生碰撞,由此,能够有效避免碰撞误检测,无需考虑动力学模型及摩擦力情况,成本较低,且易于实现。
▍3、拖拽示教跟随系统
在工业4.0的大背景下,机械臂的应用与普及程度成为衡量一个国家自动化实力的一个重要方面。目前机械臂的应用主要是完成的任务未通过专业人员的预先编程,使其按照程序设定和外部信号完成相应运动。机械臂的编程主要包含三种:固定点程序、示教编程、离线编程,另外某些机器臂具备拖动示教编程的功能,降低该行业的准入门槛,为机器人的工业化自动化的普及奠定基础。
当前机械臂编程的几种方式:固定点程序一般应用于单一工况;示教编程一般采用直接示教法,即机械臂通过关节空间运动和笛卡尔空间运动,使机器人运行至目标规划点;离线编程则是预先写好逻辑,将点的信息预先计算好后,然后采用直接示教纠正偏差值。以上方式的实现对工程师的要求较高,耗费时间长,较难获取理想的轨迹规划点,某些机器臂多采用力矩传感器实现拖动示教,虽然解决了以上问题,但是成本较高,普及难度较大。
集萃智造采用的无力矩传感器六轴机械臂零力的控制方法,主要用于解决直接示教和离线编程所伴随的工作繁琐、规划点不理想的问题,降低机器人自动化工程师的应用门槛。该控制方法要求机器臂各关节均使用谐波减速机该柔性元件,且具备基本的示教编程功能,与轻型协作机器人的设计契合。
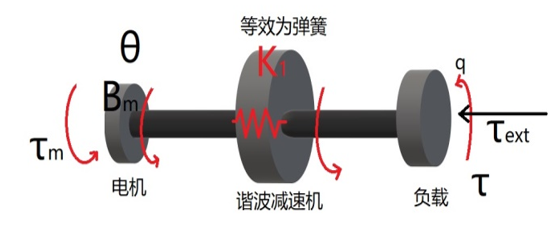
柔性关节等效力矩模型
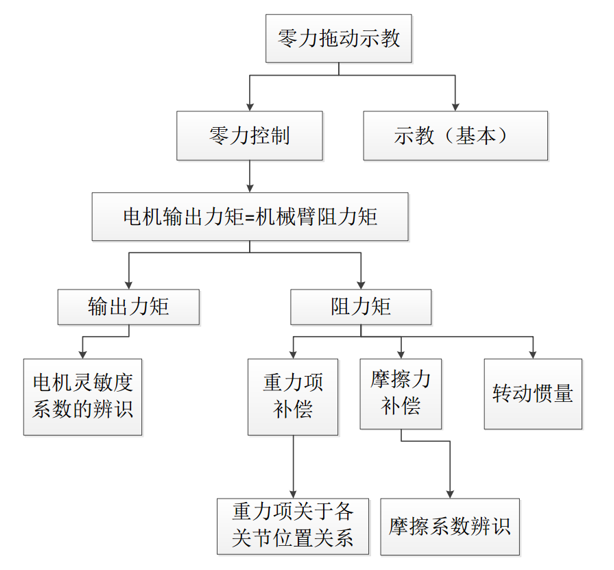
图2.拖拽示教操作控制流程




;){kind=link}